高等教育领域数字化综合服务平台






上海理工大学
上海市
- 0 高校采购信息
- 623 科技成果项目
- 0 创新创业项目
- 0 高校项目需求
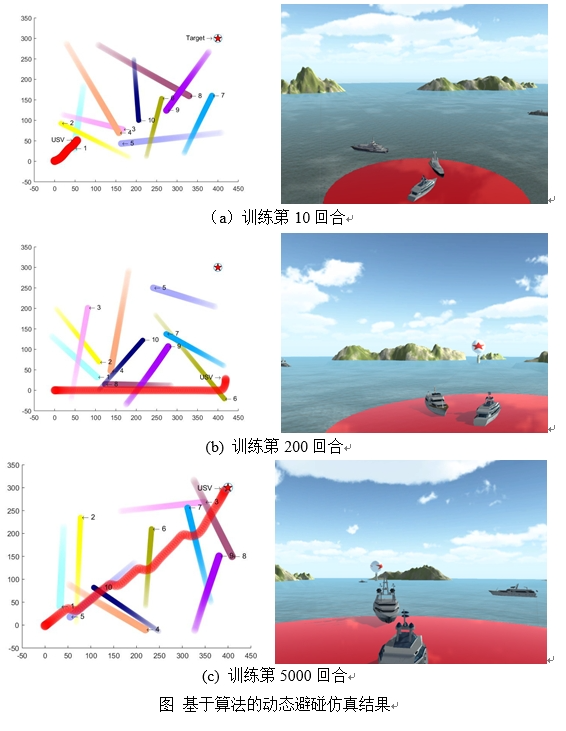
基于强化学习的无人船动态避碰及路径规划算法研究


所属领域:
项目成果/简介:
自主避障算法作为无人艇自动控制系统的核心之一,是保证无人艇(USV)安全航行的关键。为保证船舶智能避碰系统输出决策方案的合理性、有效性和可信性,需要在《国际海上避碰规则》的约束下对船舶避碰及路径规划技术进行研究。本研究围绕USV避碰控制开展USV在复杂动态环境中的避碰及路径规划问题,建立USV运动控制实验平台,在此环境下验证所提出的避碰算法的有效性。本研究主要研究工作如下:
1.从船舶操纵性出发,结合船舶避碰实践,建立起基于船舶操纵的避碰行动数学模型。
2.提出基于深度强化学习的海事规则动态避障算法。
3.为实现无人船舶在海上自主安全航行,根据所提出的避碰导航方法,搭建了基于模型船的USV避碰导航测试平台。
相关技术指标:算法应满足无人船避碰要求,能够判断双方会遇局面(对遇、交叉、追越),以安全的转向幅度(舵角的控制范围 [-35°,35°])、安全距离和速度及早采取避碰措施,且避碰行动满足国际海上避碰规则要求。
技术创新点:1.提出无人船航行环境及会遇局面的类型辨识建模新方法。2.船舶航行中具有惯性、时变不确定性等复杂的非线性特征,克服传统避碰算法计算量大、无法实时给出避碰决策的问题,充分发挥采用强化学习的策略控制机制,搭建模块化的神经网络架构,用于引导无人船躲避障碍物和趋向目标位置。
项目阶段:
相对成熟。

扫码关注,查看更多科技成果
取消
确定