





近日,我校机电工程学院孙立宁教授、杨湛教授课题组,哈尔滨工业大学谢晖教授课题组以及德国马克斯普朗克智能系统研究所的Metin Sitti教授课题组,联合研制出能自由穿梭在极端变化环境中的尺度可调控磁液滴机器人SMFR(图一)。这种机器人不仅可以凭借优异的变形能力穿过狭窄的受限空间,还能在必要的条件下通过分裂或者融合的方式,实现自身尺度的按需调整,以适应极端环境和特定任务的变化。这项工作非常适合应用于靶向医疗相关领域,如靶向给药,微型外科手术等。利用SMFR的可变形性和强大的尺度调控能力有助于提高其在体内受限环境中的适应能力和病变组织深处的可达性,最终实现人体内部运输药物、生物电子传感器、微创医疗等应用,从而造福人类。论文以“Scale-reconfigurable miniature ferrofluidic robots for negotiating sharply variable spaces”为题发表在顶尖学术期刊《Science Advances》。
磁液滴机器人的尺度缩放原理
不同尺度的微机器人具有其独特的应用场景,在不同的应用场景可能需要选用最为合适的机器人,才能提高应用的成功率。例如尺度更大的机器人执行能力越大,负载能力也有很大提升,但是随着尺寸的增加,其在人体内的穿越能力急剧下降,因此难以触及体内较深的病变组织;尺度小的机器人虽然执行能力弱,负载能力小,但是具有更灵活的运动性能,可穿越更小的组织间隙,因此有望到达人体内极深的组织环境。能够在同一类机器人实现这两种策略的巧妙结合,实现1+1>2的效果,是这项科研工作最为关注的问题。
受自然界中液滴行为的启发,研究人员提出了基于磁流体液滴制备具有大变形能力的机器人的想法。磁流体的本质是具有磁性的四氧化三铁纳米颗粒分散在液体中形成的稳定流体,因此既具有很好的磁控性,又具有液体的流动性。通过在外部施加磁扭矩和磁梯度力,最终实现了磁流体液滴机器人的变形以及尺度可控切换。另一方面,受杠杆原理的启发,研究人员还提出了一种新颖的磁杠杆机制,并据此设计了一个新型的复合式磁驱动系统M3RA(multiscale magnetic miniature robot actuation),该装置集成了四个电磁体和一个球形永磁体,结构非常像中国传统文化中的龙戏珠造型。该复合式磁控系统可以利用电磁体产生的微弱背景磁场,转动永磁体产生的强大目标磁场。因此该系统可以为机器人提供强大的磁场梯度力和磁扭矩,可同时兼容微米到厘米尺度磁液滴机器人的运动控制,使得微型机器人的跨尺度控制成为可能。该系统结构非常紧凑,并且与传统磁控线圈的封闭结构不同,M3RA具有典型的半开放式结构,能够更好地贴近操作对象而不用将整个操作对象纳入工作空间当中。
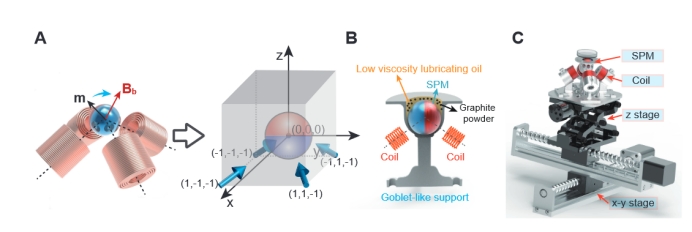
M3RA磁驱系统结构设计示意图
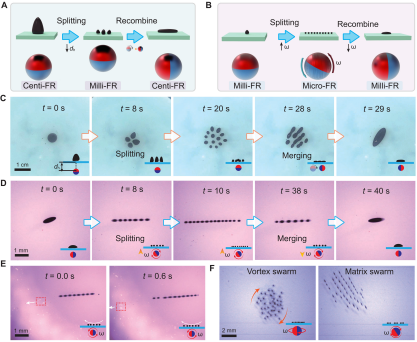
对于不同尺度的SMFR,研究人员有不同的控制策略。具体来说就是,对于微米尺度的SMFR,他们通过施加外部旋转磁场,让机器人滚动起来,这样机器人就会类似一个旋转的轮子能在基地上自由的滚动;对于厘米尺度SMFR,则采用磁梯度力拖拽的方式来控制机器人的运动,类似用磁体拖拽普通磁性物质,只不过在这里研究人员通过算法来实现机器人更高效率的运动控制。而对于毫米尺度的SMFR,他们则采取磁扭矩和磁梯度力结合的方式,以更高效的方式实现SMFR的运动控制。

SMFR跨尺度驱控原理和受限环境下的运动行为实验
孙立宁教授表示,“SMFR的尺度调控则是通过液滴的分裂和融合实现的。通过在厘米尺度SMFR周围施加较强的磁场使得SMFR每个部分相互排斥,再加上其流动性就会产生分裂的效果变成毫米尺度SMFR。此外,为进一步分裂毫米尺度SMFR,团队还提出了基于旋转磁场的分裂策略,可以使得毫米尺度SMFR进一步分裂成微米尺度SMFR。小尺度的SMFR缩放到大尺度更为容易一些,可以直接利用SMFR的液体特性通过融合的方式实现。通过以上方法,可以实现SFMR从大到小以及从小到大的可控调控。”
“我们致力于借助SFMR强大的变形能力和尺度自适应能力,将它应用到生物医疗应用中,通过在不同尺寸的组织间隙和人体腔道中自由航行,有望为实现体内靶向诊疗提供一种更高效有利的运载工具。”Metin Sitti教授总结道。
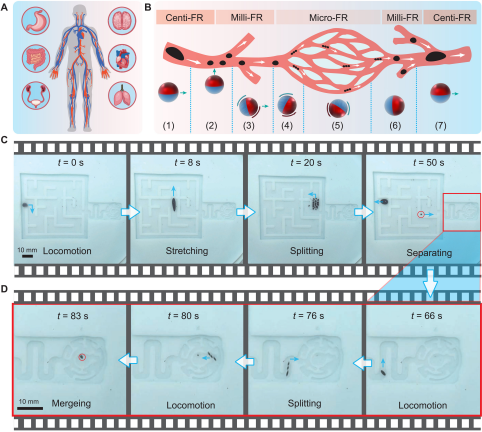
SMFR在活体剧变环境(模拟)下的运动控制、变形与尺度缩放
这款新型尺度可重构的磁液滴机器人是微型机器人技术和软体机器人技术发展的重要里程碑。以前的研究工作主要关注固定尺寸的微型机器人,而没有考虑机器人尺寸与所处环境的匹配关系,因此只有当这类机器人所处受限空间的横截面尺寸与机器人的横截面尺寸相当时才能产生有效的主动运动。未来研究工作将集中于与生物医学相关的应用研究,例如基于SMFR的靶向药物输送、精确的局部磁热疗或肿瘤血管的选择性闭塞等。